¿Que es ultrasonido?
El oído humano puede escuchar la frecuencia del sonido alrededor de 20HZ ~ 20KHZ, y el ultrasonido es la onda de sonido más allá de la capacidad humana de 20KHZ[1].
HC-SR04
El HC-SR04 es un sensor de distancias por ultrasonidos capaz de detectar objetos y calcular la distancia a la que se encuentra en un rango de 2 a 450 cm. El sensor funciona por ultrasonidos y contiene toda la electrónica encargada de hacer la medición. Su uso es tan sencillo como enviar el pulso de arranque y medir la anchura del pulso de retorno. De muy pequeño tamaño, el HC-SR04 se destaca por su bajo consumo, gran precisión y bajo precio por lo que esta reemplazando a los sensores polaroid en los robots mas recientes.
Características
- Los módulos incluyen transmisores ultrasónicos, el receptor y el circuito de control.
- Corriente de reposo: menor 2mA
- Corriente de trabajo: 15mA
- Ángulo de medición: 30º
- Ángulo de medición efectivo: menor 15º
- Detección de 2cm a 400cm o 1" a 13 pies (Sirve a más de 4m, pero el fabricante no garantiza una buena medición).
- "Resolución" La precisión puede variar entre los 3mm o 0.3cm.
- Frecuencia de trabajo: 40KHz
Dimensiones
Las dimensiones del HC-SR04 son 40mm x 20mm x 15mm, como se observa en la siguiente imagen:

Pines conexión
| Pin | Descripción |
|---|---|
| VCC | 5V de alimentación |
| Trig | Trigger pin |
| Echo | Pin receptor |
| GND | Conexión tierra |
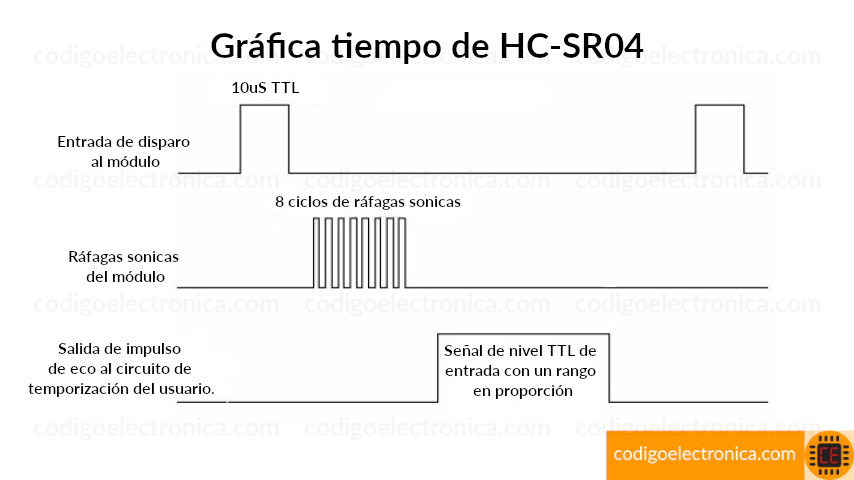
Diagrama tiempo
Solo necesita suministrar un pulso corto de 10uS a la entrada del disparador para iniciar el rango, y luego el módulo enviará una ráfaga de ultrasonido de 8 ciclos a 40 kHz y aumentará su eco. El eco es un objeto de distancia que es el ancho del pulso y el rango en proporción. Puede calcular el rango a través del intervalo de tiempo entre el envío de la señal de disparo y la recepción de la señal de eco. Fórmula: uS / 58 = centímetros o uS / 148 = pulgada; o: el rango = tiempo alto nivel * velocidad (340M / S) / 2; le sugerimos que utilice un ciclo de medición de más de 60 ms para evitar que la señal de disparo llegue a la señal de eco[3].
Principio de medición ultrasónica
El transmisor ultrasónico emitió una onda ultrasónica en una dirección y comenzó a sincronizar cuando se lanzó[2]. Se extendió por ultrasonidos en el aire y regresaría inmediatamente cuando se encontrara con obstáculos en el camino. Finalmente, el receptor ultrasónico detendría la sincronización cuando recibiera la onda reflejada. Como la velocidad de propagación ultrasónica es de 340 m/s en el aire, según el registro del temporizador t, podemos calcular la distancia(s) entre el obstáculo y el transmisor, es decir: s = 340 t/2, que es lo que se conoce como diferencia de tiempo, distancia medida principio
El principio de la medición ultrasónica de la distancia utilizó la velocidad de propagación del aire ya conocida, midiendo el tiempo desde el lanzamiento hasta la reflexión cuando encontró un obstáculo, y luego calcula la distancia entre el transmisor y el obstáculo de acuerdo con el tiempo y la velocidad. Por lo tanto, el principio de medición de distancia ultrasónica es el mismo con el radar.
La fórmula de medición de distancia se expresa como:
Donde L es la distancia medida y C es la velocidad de dispersión ultrasónica en el aire, además, T representa el tiempo (T es la mitad del valor de tiempo desde la transmisión hasta la recepción).
Funcionamiento
En el post de arduino hcsr04 encontrará la conexión y el código de este sensor
Referencias
[1] Wikipedia ultrasonido https://es.wikipedia.org/wiki/Ultrasonido, Consultado abril 2019
[2] Elecfreaks https://elecfreaks.com/estore/download/EF03085-HC-SR04_Ultrasonic_Module_User_Guide.pdf, Consultado abril 2019
[3] Mouser https://www.mouser.com/ds/2/813/HCSR04-1022824.pdf, Consultado abril 2019